原文:How To Switch Between Intel and Nvidia Graphics Card on Ubuntu
翻译水平有限,还望批评指正,都㚏2020s了,有关解决方案大家还是自行Google吧。
在笔记本上如何查看核显和N卡是折腾显卡的第一步。这篇文章展示在Ubuntu理如何和谐的切换Intel核显和N卡。
你应该使用哪块显卡?
对于游戏和3D绘图等要求大量图形计算来说,应该切换至N卡。
如果你对游戏和3D绘图不感觉兴趣,那么,Intlel核显将满足你的日常使用,并且比起N卡更省电。
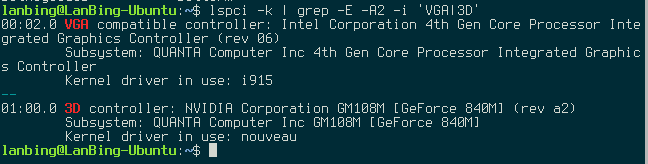
#1 查看电脑上哪些显卡
在Ubuntu下可以非常简单的做这个事:
lspci -k | grep -E -A2 -i 'VGA|3D'
#2 查看正在使用哪块显卡
Ubuntu 默认会使用Intel核显。
如果你以前对显卡驱动做过改动,又不记得了,那么可以在图形界面下,系统设置 > 细节 (system settings > details)中查看。
#3 安装Nvidia显卡驱动
Ubuntu本身集成了N卡开源驱动nouveau在Linux内核里,但此驱动缺少3D加速的支持. 要发挥显卡性能,我们可以用software-properties-gtk程序去安装合适的驱动。
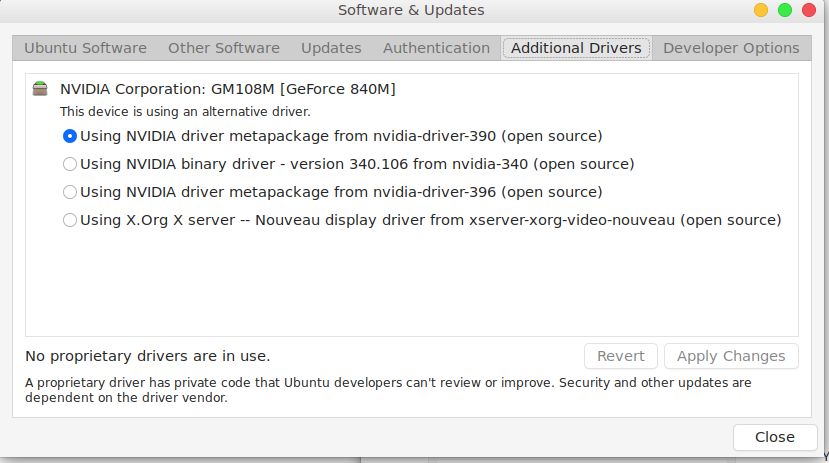
你可以选择最新的版本,应用更改。
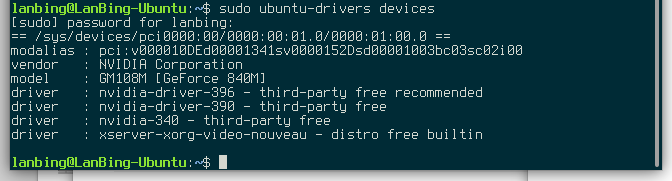
也可以通过下列命令,查看推荐的驱动版本:
sudo ubuntu-drivers devices
下列命令将会自动安装Nvidia驱动。
sudo ubuntu-drivers autoinstall
在合适的驱动安装成功后,重新打开系统设置 > 细节 (system settings > details),你将会看到新安装的驱动已经选择上了,如果没有的话,请自行选择,并应用修改。
现在我们已经安装好了合适的N卡驱动了,但是,我们仍然在使用Intel核显。
#4 切换到N卡
在你选择好了N卡驱动后,可能需要重启你的电脑,以启用PRIME支持。如果PRIME没有启动,可能会出现下面的信息:
Message: PRIME: is it supported? no
重启之后,可以从应用列表中打开Nvidia X Server Settings,或者从命令行打开:
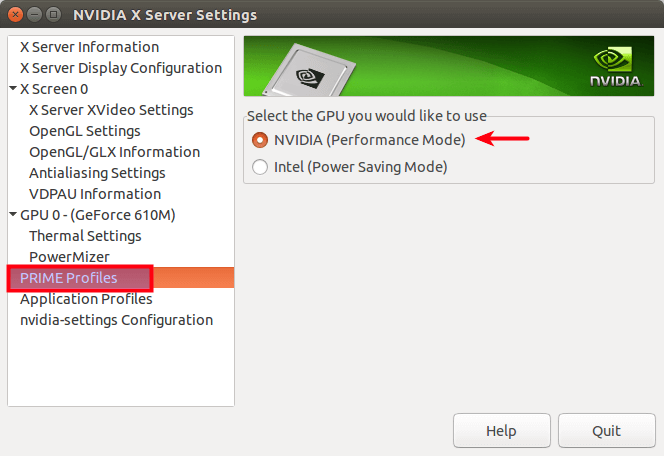
在PRIME Profiles` 选项卡中,选择你想切换的显卡, 重启电脑。
你就可以在系统设置 > 细节 (system settings > details)中看到N卡了。
想要切换回Intel核显,只需要在上图中点击Intel即可。
也可以通过命令行的方式,切换到核显:
或N卡:
查看哪块显卡正在使用:
如何和卸载N卡驱动
有时个你Nvidia安装失败,或者没有成功,黑屏了,没有办法进入图形界面,或者出现以下错误:
driver ebridge is already registered aborting
这种情况你需要完全的卸载N卡驱动,通过运行下列命令,完全移除nvidia相关包:

