这次北理面向在读研究生举办CTF大赛,直接线下赛,时长12小时,其中选择填空1小时,关卡题2小时(之后加时2小时),9小时攻防,攻防赛题在先知安全有提到。
由于第一届,邀请的学校队伍属于中等偏下水平。最后,24支队伍只有9个分数为正,另有近一半左右队伍线下攻防没有拿分。
主办方声称原则上不提供外网环境。
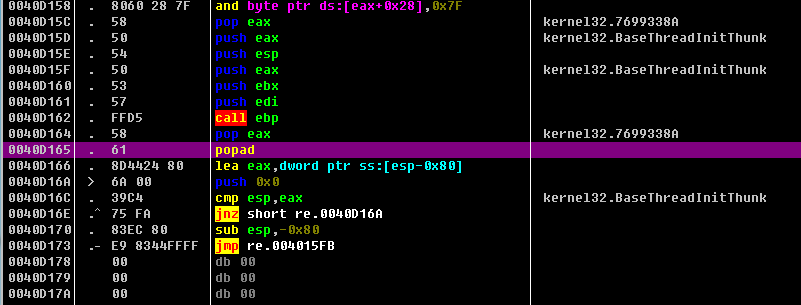
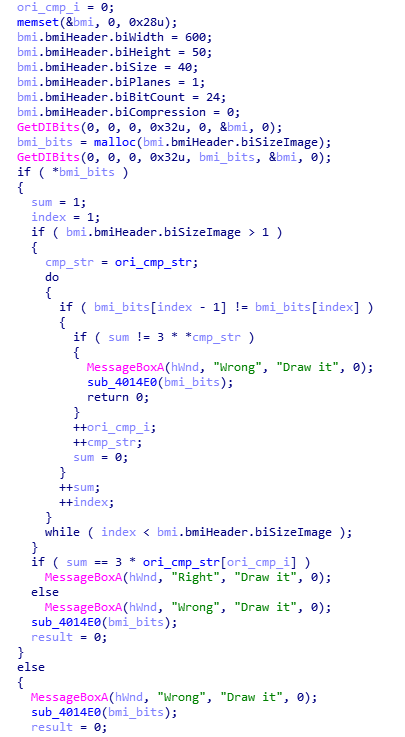
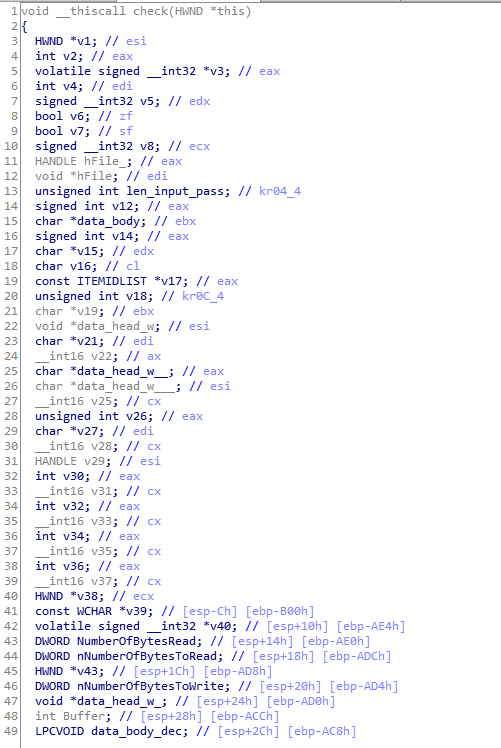
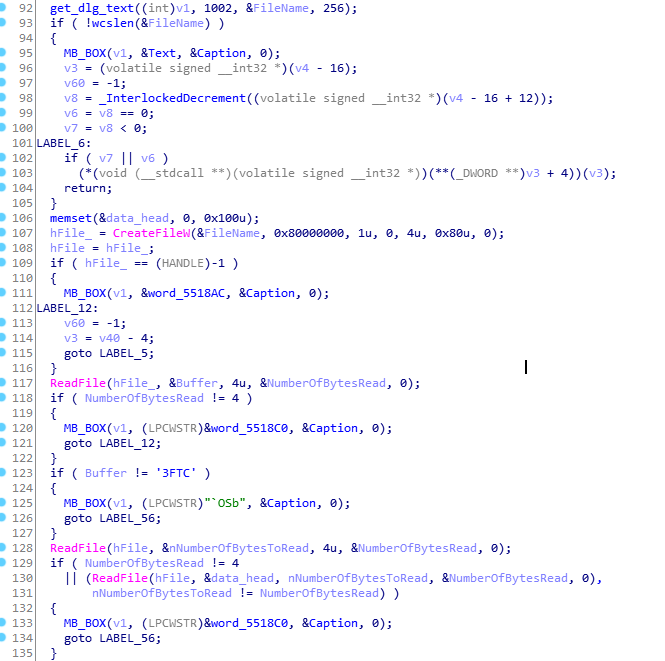
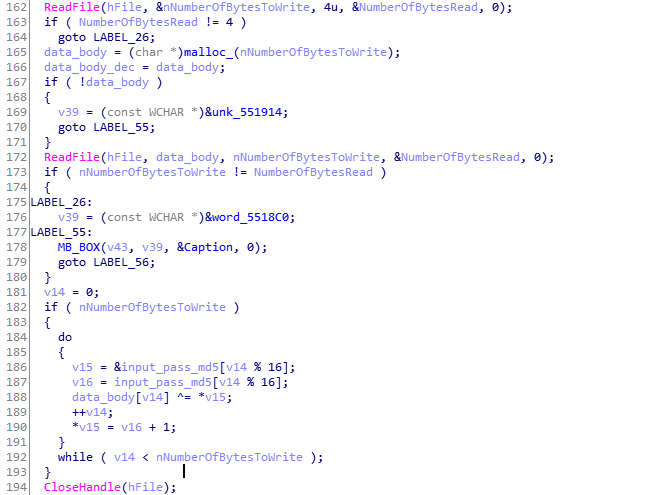
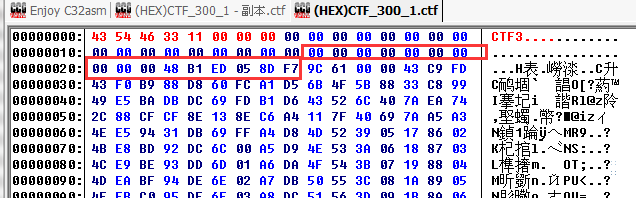
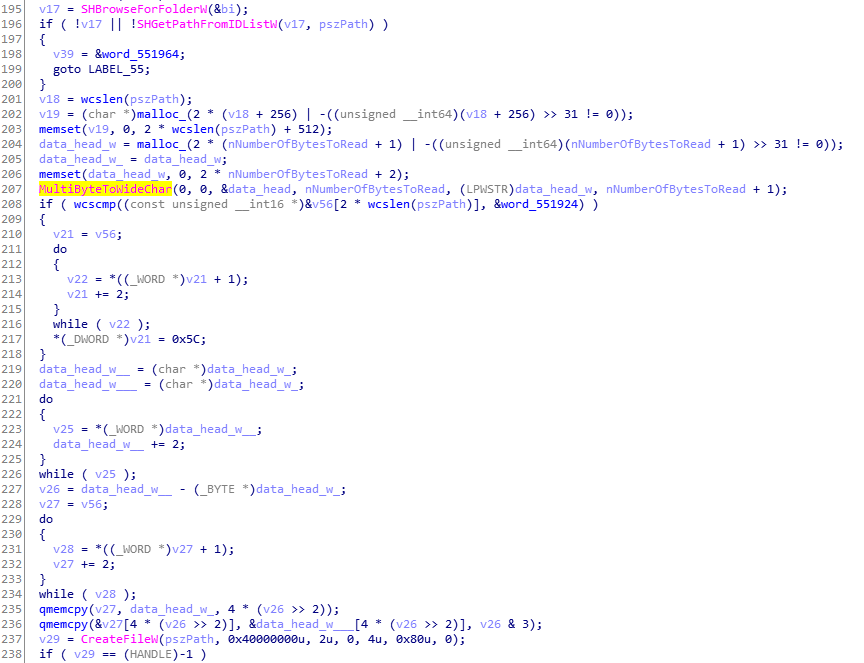
逆向题只有一道,而且为mips架构第一次遇到。手上没有运行环境,只能静态调,花了一个多小时才搞清楚流程,之后时间不够只能做罢,后来发现当场也没有人做出。
赛后再分析一遍其实还是挺简单的。
先附上解密代码,回舍,日后有时间再补。
程序: mips

#include <stdint.h>
#include <stdio.h>
void dec(uint32_t *val, uint32_t *k)
{
uint32_t delta = 0x9e3779B9;
uint32_t sum = 0xb8ab04e8;
uint32_t v1 = val[1], v0=val[0];
for(int i = 0; i < 40; i++)
{
v1 -= ((v0 << 4 ^ v0 >> 5) + v0) ^ (sum + k[(sum >> 11) & 3]);
sum -= delta;
v0 -= ((v1 << 4 ^ v1 >> 5) + v1) ^ (sum + k[sum & 3]);
}
printf("0x%x~~~\n", sum);
val[0] = v0;
val[1] = v1;
return ;
}
int main()
{
uint32_t key[4]={
0x2bc12411, 0x0deadbee, 0x0276630b, 0x014f53f5
};
uint32_t value[]={
0x9a5e3731, 0x2ed28785,
0xeb26da7d, 0x82b06241,
0x21d9dcd4, 0x44bdda49,
0x15f62308, 0x7b0546ee,
0xf6b4a519, 0x71c0d531
};
for(int i =0; i< 10; i+=2)
{
dec(&value[i],key);
}
printf("%s\n", value);
//printf("0x%8x, 0x%8x\n", value[0], value[1]);
return 0;
}